




| EN BREF |
|
Les robots quadrupèdes, inspirés par la nature, représentent une avancée majeure dans le domaine de la robotique mobile. Grâce à l’utilisation de synergies de locomotion basées sur les mouvements canins, une équipe de chercheurs a mis au point un robot capable de se déplacer comme un chien, sans moteurs traditionnels. Ce développement s’appuie sur une combinaison de l’actuation par synergie et de la compliance optimale, permettant une adaptation impressionnante aux environnements complexes.
La mobilité robotique bioinspirée
Les animaux quadrupèdes, tels que les chiens, utilisent leurs caractéristiques morphologiques spéciales, leurs tendons élastiques et leurs qualités biomécaniques pour se déplacer efficacement sur divers terrains. Les robots quadrupèdes cherchent à imiter ces capacités pour des tâches comme l’exploration et les opérations de recherche et sauvetage. Les systèmes de marche passive fournissent un mouvement économe en énergie grâce à leurs interactions structurelles et environnementales. Toutefois, leur adaptabilité reste limitée.
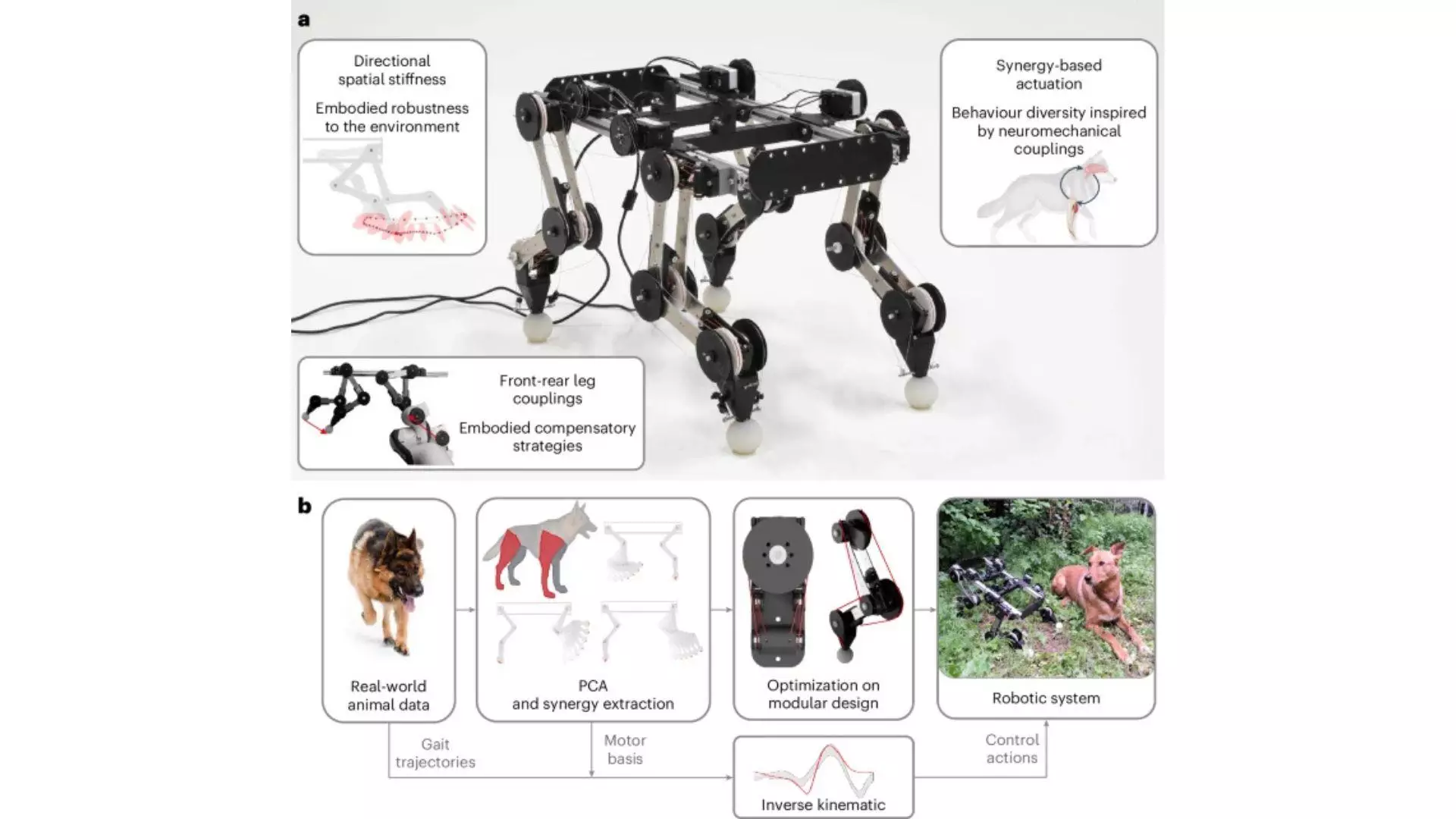
Les robots bioinspirés actuels utilisent des conceptions axées sur la compliance pour imiter les mouvements des animaux. Les chercheurs explorent désormais les synergies, des modèles de mouvement coordonnés qui simplifient le contrôle. Ces synergies réduisent le besoin de capteurs et d’actionneurs dans les systèmes humanoïdes et les mains robotiques. Le robot quadrupède PAWS utilise une combinaison d’actionnement par synergie et de compliance physique optimale pour réaliser quatre synergies de locomotion inspirées par les données biologiques des chiens en mouvement.
La quadrupède à base de synergie
Le robot PAWS est conçu en utilisant des synergies motrices et la compliance pour atteindre une robustesse et des comportements diversifiés avec une actuation minimale. Inspirés par les couplages neuromécaniques des animaux, les chercheurs ont analysé les données de mouvement des articulations canines à l’aide de l’analyse en composantes principales (ACP) pour extraire les synergies décrivant les modèles de mouvement les plus significatifs.
Quatre synergies majeures ont été identifiées, représentant plus de 80 % de la variation des mouvements des membres. La conception du robot quadrupède à tendons avec 12 articulations, contrôlé par seulement quatre actionneurs, a été guidée par cette approche. Le routage des tendons, les diamètres des poulies et la rigidité des articulations ont été optimisés pour imiter le mouvement biologique. Les essais expérimentaux montrent que le système de contrôle basé sur la synergie permet à PAWS d’afficher des allures réalistes et animales, y compris la marche, la position assise et la course.
Intelligence incarnée et adaptabilité
PAWS démontre des propriétés passives remarquables. Placé sur un tapis roulant sans actuation moteur, il a présenté une allure émergente ressemblant à un galop, montrant une robustesse aux perturbations externes et un comportement adaptatif face aux variations de vitesse. Ses couplages mécaniques et ses interactions complies ont permis stabilité et résilience face aux perturbations. Lorsqu’il est soumis à des perturbations physiques, PAWS revient systématiquement à son allure stable en un seul cycle.
Cette étude souligne le potentiel de la conception basée sur les synergies pour créer des robots efficaces, résilients et adaptatifs. Selon l’équipe, PAWS offre des perspectives sur la locomotion bioinspirée et les avantages de réduire la complexité de l’actuation, avec des applications dans des environnements robotiques difficiles et dynamiques.
Enquête choc : ces influenceurs très connus qui achètent des followers pour gagner de l’argent
Applications et perspectives futures
Le développement de PAWS représente une avancée significative dans l’ingénierie robotique. En combinant des données biologiques avec des techniques de pointe en ingénierie, les chercheurs ont créé une machine qui pourrait révolutionner la manière dont les robots interagissent avec leur environnement. Les implications de cette technologie s’étendent au-delà de la simple locomotion, avec des applications potentielles dans des domaines variés tels que l’assistance robotique, l’exploration de terrains difficiles et même des interventions en cas de catastrophe.
Les recherches futures pourraient se concentrer sur l’amélioration de l’intelligence cognitive embarquée, permettant au robot de prendre des décisions autonomes basées sur des stimuli environnementaux. La question demeure : comment cette technologie pourrait-elle être intégrée dans notre quotidien pour enrichir la collaboration homme-machine?




Bravo aux chercheurs pour cette avancée technologique incroyable ! 🎉
Est-ce que le robot peut déjà rapporter un bâton comme un vrai chien ? 😄
Pourquoi développer un robot chien alors qu’on a déjà des chiens ? 🤔
C’est fascinant ! Comment ce robot pourrait-il changer la vie quotidienne des gens ?
J’aimerais bien voir ce robot en action, ça doit être impressionnant !
Un pas de plus vers la révolution robotique ! Merci pour cet article. 🙌
C’est génial mais est-ce écologique par rapport aux vrais chiens ?
Je suis sceptique… sans moteur, vraiment ?
Est-ce que ce robot peut détecter des obstacles comme un vrai chien ?
Ça a l’air cool, mais quel est le coût de fabrication de ce robot ?
J’espère que ce genre de technologie sera accessible au grand public bientôt. 🤞
Je me demande si ce robot pourrait être utilisé dans les opérations de sauvetage.
La technologie avance à une vitesse folle, c’est incroyable !
Je suis curieux de savoir comment ils ont réussi à imiter les mouvements si précisément.
Les chiens vont-ils être jaloux de ce nouveau concurrent ? 😂
Merci pour cet aperçu des merveilles de la robotique !
Les robots remplaceront-ils nos animaux de compagnie un jour ?
Est-il prévu d’ajouter des fonctionnalités supplémentaires à ce robot ?
Les synergies de locomotion, c’est la première fois que j’en entends parler. Fascinant !
Comment fait le robot pour s’adapter aux terrains variés ?
J’ai hâte de voir ce que l’avenir réserve à cette technologie. 🚀
Une avancée technologique qui mérite d’être suivie de près !
Merci pour cet article, c’est une vraie mine d’informations !
Combien de temps a-t-il fallu pour développer ce robot ?
Je serais curieux de voir comment ce robot s’en sort face à un vrai chien. 🐕