




| EN BREF |
|
Les avancées technologiques dans le domaine des prothèses robotiques témoignent d’un progrès remarquable dans la compréhension et la reproduction des fonctions humaines complexes. La dernière innovation de l’Université Johns Hopkins ne fait pas exception, avec une main prothétique capable de saisir des objets avec la précision d’une main humaine. À travers l’utilisation d’un design hybride combinant des composants rigides et souples, cette prothèse offre une expérience sensorielle enrichie pour les utilisateurs, promettant une interaction plus sûre et plus naturelle avec leur environnement.
Une conception hybride révolutionnaire
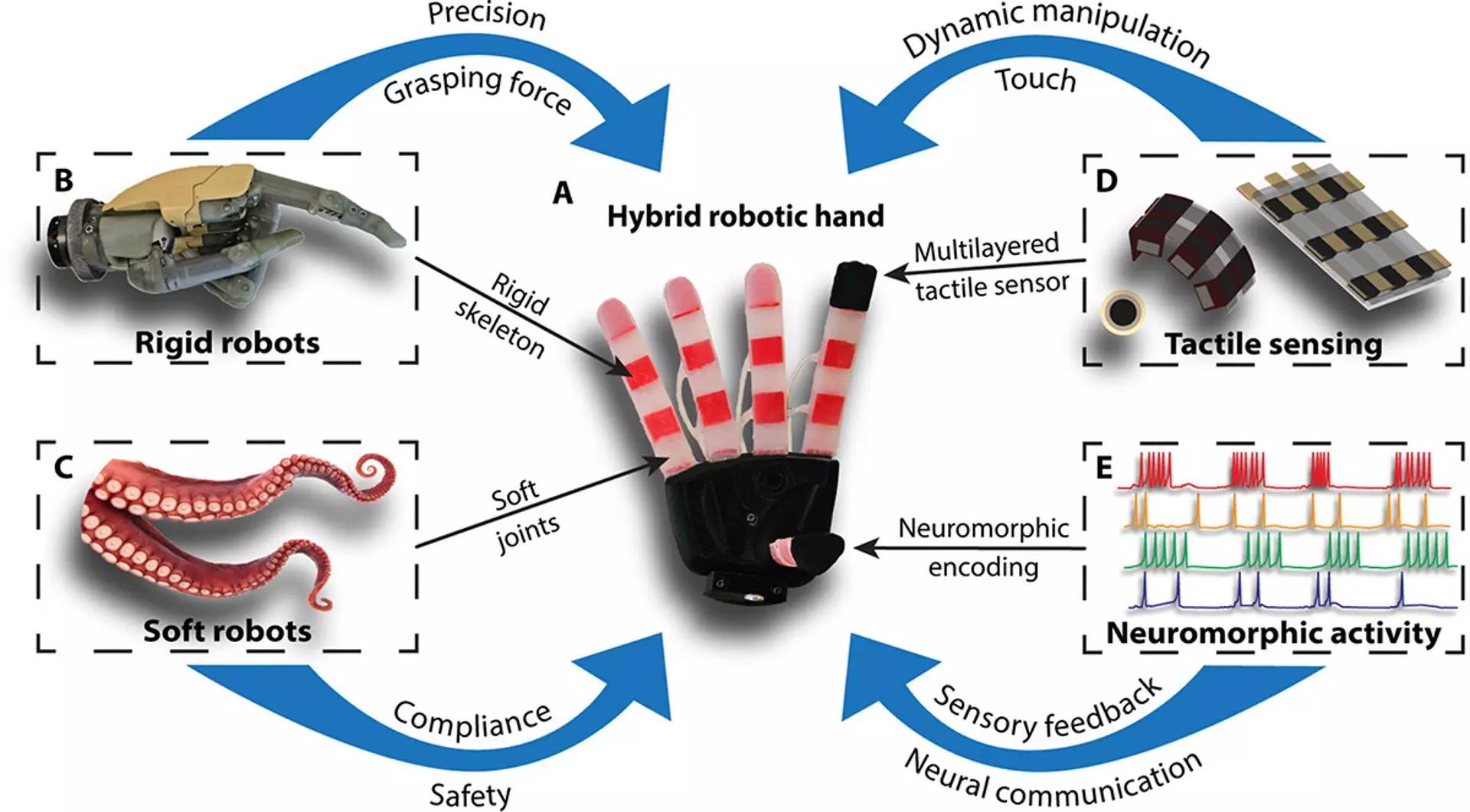
La main bionique développée par l’équipe de l’Université Johns Hopkins se distingue par son design hybride, qui intègre des composants rigides et souples pour imiter la structure naturelle de la main humaine. Ce design permet à la prothèse de s’adapter et de saisir une variété d’objets avec précision et délicatesse. Les doigts articulés sont fabriqués à partir de polymères souples semblables au caoutchouc, et possèdent un squelette rigide imprimé en 3D. Cette combinaison assure non seulement la solidité de la prothèse, mais aussi sa flexibilité, nécessaire pour réaliser des mouvements complexes.
La prothèse est équipée de trois couches de capteurs tactiles inspirés de la biologie, permettant de distinguer une large gamme d’objets. Les articulations des doigts, remplies d’air, peuvent être contrôlées par les muscles de l’avant-bras de l’utilisateur, ce qui constitue un atout majeur pour ceux qui ont subi une perte de membre supérieur. Grâce à ce système, la main peut manipuler des objets aussi variés que des jouets en peluche délicats, des bouteilles métalliques ou même des gobelets en plastique remplis d’eau, sans les endommager.
Retour sensoriel naturel
Un aspect clé de cette innovation est l’intégration d’un système de retour sensoriel naturel. Les informations sensorielles des doigts de la prothèse sont traduites en un langage nerveux qui permet de fournir un retour sensoriel à travers la stimulation électrique des nerfs. Cette technologie s’appuie sur des algorithmes d’apprentissage machine pour traiter les signaux reçus des capteurs avant de les rediriger vers les nerfs dans le corps de l’utilisateur.
Ce processus de rétroaction sensorielle établit un pont entre le cerveau et les nerfs, permettant à la main de réagir à ce qu’elle touche. En conséquence, l’utilisateur peut ressentir des sensations qui imitent celles d’une main naturelle, rendant l’utilisation de la prothèse plus intuitive. Cette approche innovante marque une avancée significative par rapport aux dispositifs de prothèse précédents, qui n’offraient pas un niveau de rétroaction sensorielle aussi détaillé et réaliste.
Contrôle par signaux EMG
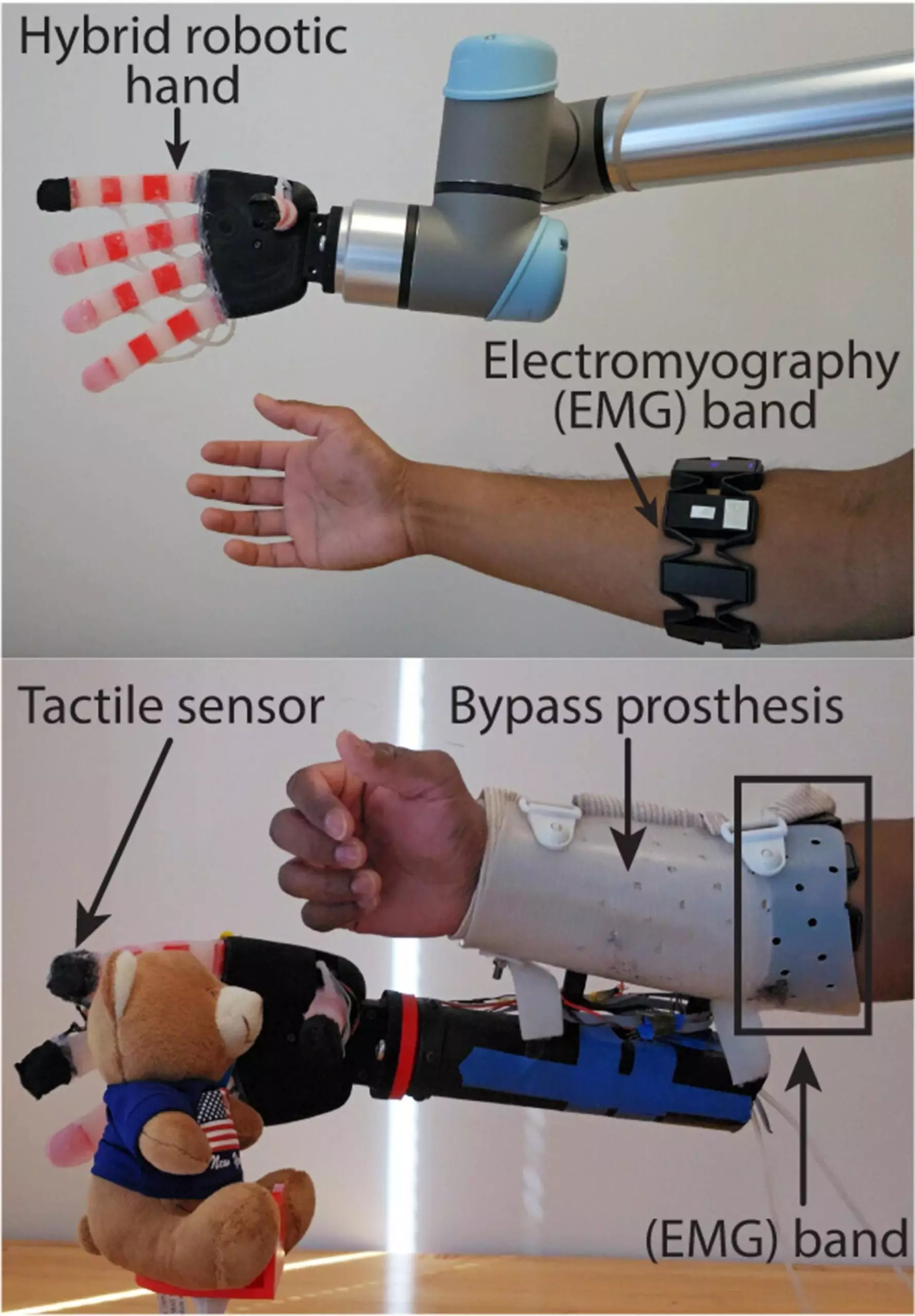
Pour contrôler la main bionique, les chercheurs utilisent des signaux EMG, qui sont traditionnellement utilisés par les personnes ayant perdu un membre supérieur pour manipuler des mains prothétiques myoélectriques. Un dispositif de contrôle gestuel, le Myo Armband, d’une valeur de 150 USD, capte et amplifie les signaux EMG, tandis qu’un microcontrôleur Arduino assure l’actionnement pneumatique de la main robotique.
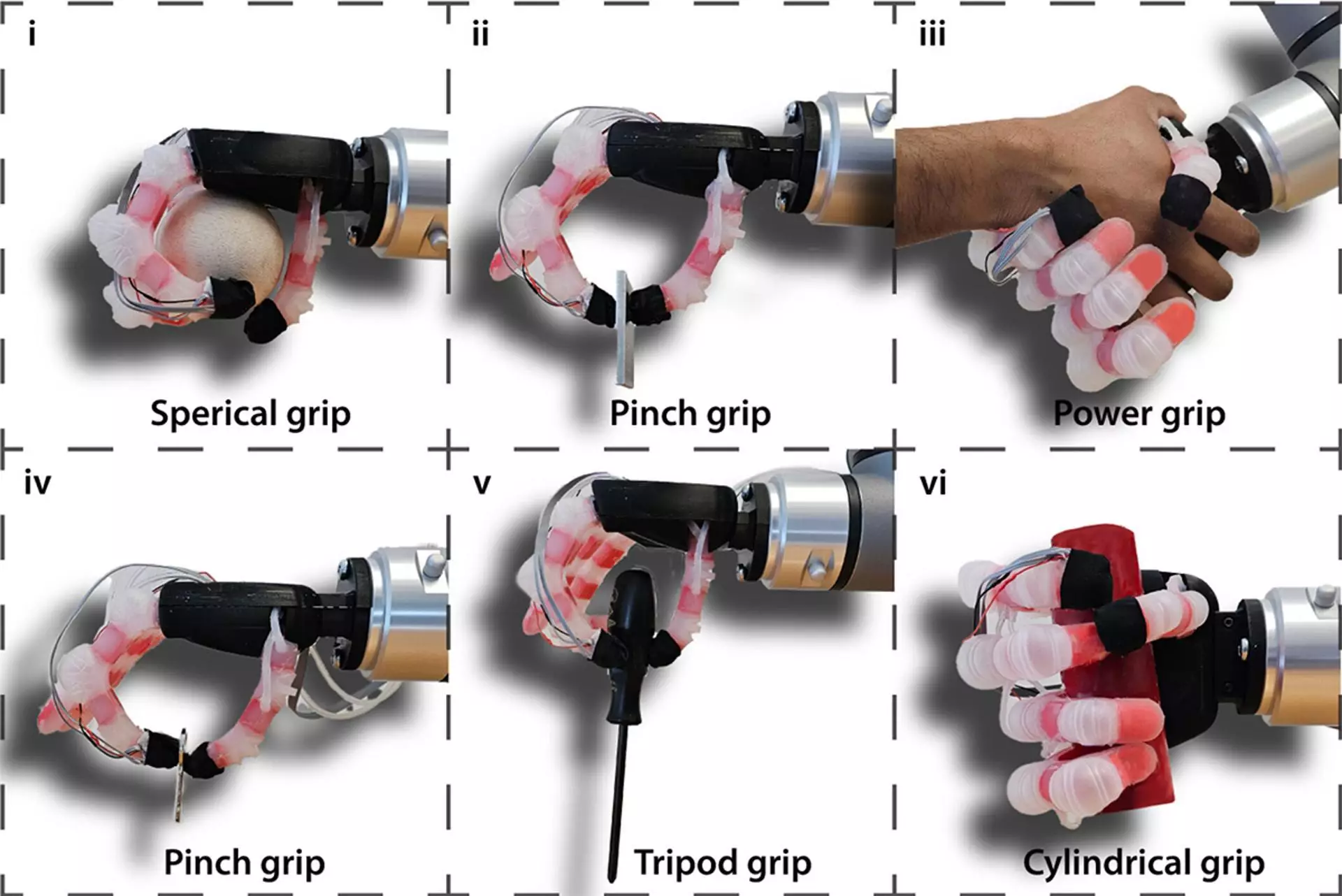
Cette méthode de contrôle permet une manipulation subtile et précise des objets, simulant de manière réaliste la façon dont une main humaine réagirait dans des situations similaires. Comme l’explique Nitish Thakor, directeur de la recherche, lorsqu’une personne tient une tasse de café, par exemple, son cerveau reçoit des signaux de sa paume et de ses doigts l’avertissant que la tasse est sur le point de glisser. Le système développé par l’équipe de Johns Hopkins reproduit ce mécanisme, modélisant les récepteurs tactiles de la main pour générer des messages semblables à ceux des nerfs.
Perspectives futures pour la prothèse bionique
Cette main prothétique de nouvelle génération ouvre la voie à des dispositifs plus précis et naturels pour les amputés, tout en offrant une plus grande dextérité aux robots humanoïdes chargés de manipuler des objets délicats à domicile ou sur les chaînes de montage. L’équipe de recherche prévoit de continuer à améliorer cette technologie en explorant l’ajout de forces de préhension plus puissantes, de capteurs supplémentaires et de matériaux de meilleure qualité.
L’impact potentiel de cette technologie est immense, non seulement pour les personnes ayant subi une amputation, mais aussi dans le domaine de la robotique industrielle. Les applications possibles sont nombreuses, allant de l’aide à domicile pour les personnes âgées ou handicapées, à l’amélioration de la productivité et de la précision dans les tâches de fabrication automatisées.
La main bionique développée par l’Université Johns Hopkins représente une avancée prometteuse dans le domaine des prothèses et de la robotique. En intégrant des technologies de pointe telles que le retour sensoriel naturel et le contrôle par signaux EMG, elle offre une expérience utilisateur inégalée. Comment ces avancées transformeront-elles notre perception des prothèses et des robots dans les années à venir ?




Incroyable ! Peut-on espérer voir cette technologie accessible au grand public bientôt ? 🤔
Je suis impressionné par la capacité de cette main à tenir un œuf sans le casser. Bravo à l’équipe de Johns Hopkins !
Est-ce que cette prothèse sera abordable pour les personnes qui en ont besoin ?
Ça fait vraiment avancer la science, mais j’espère que ça ne remplacera pas nos propres mains un jour ! 😅
Félicitations pour cette avancée technologique ! Les possibilités semblent infinies.
Un grand merci aux chercheurs pour cette innovation. Vous changez des vies ! 😊