




| EN BREF |
|
Dans le domaine de la robotique aquatique, l’innovation continue de repousser les limites de ce qui est possible. Un excellent exemple de cette avancée est un robot inspiré des mouvements naturels des vers marins. Ce robot, conçu pour naviguer dans des environnements aquatiques sensibles, se distingue par son mécanisme de propulsion unique qui imite les ondulations des vers plats. Cette technologie bio-inspirée promet de minimiser l’impact sur la faune marine tout en offrant des capacités de navigation exceptionnelles.
Une inspiration venue des fonds marins
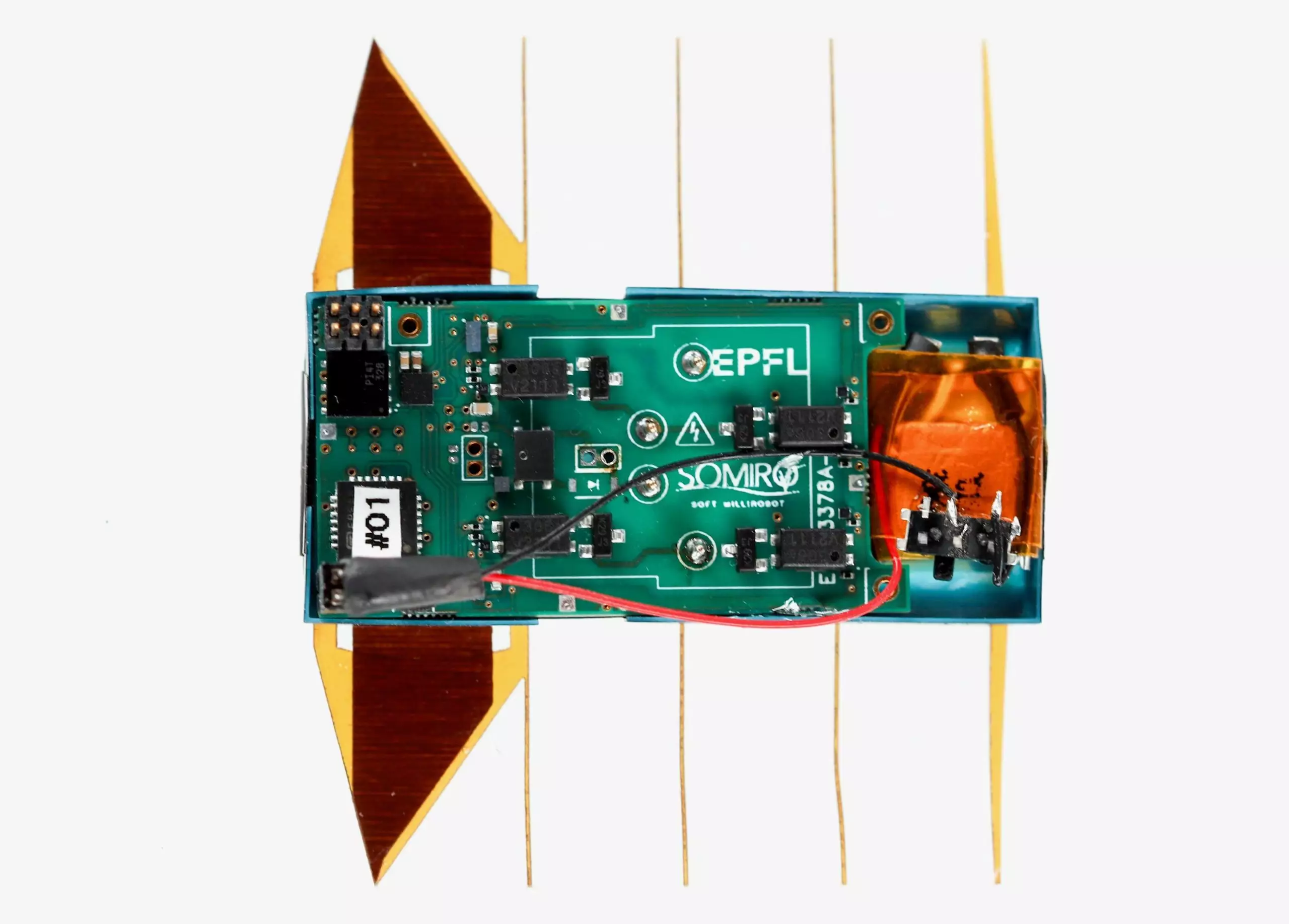
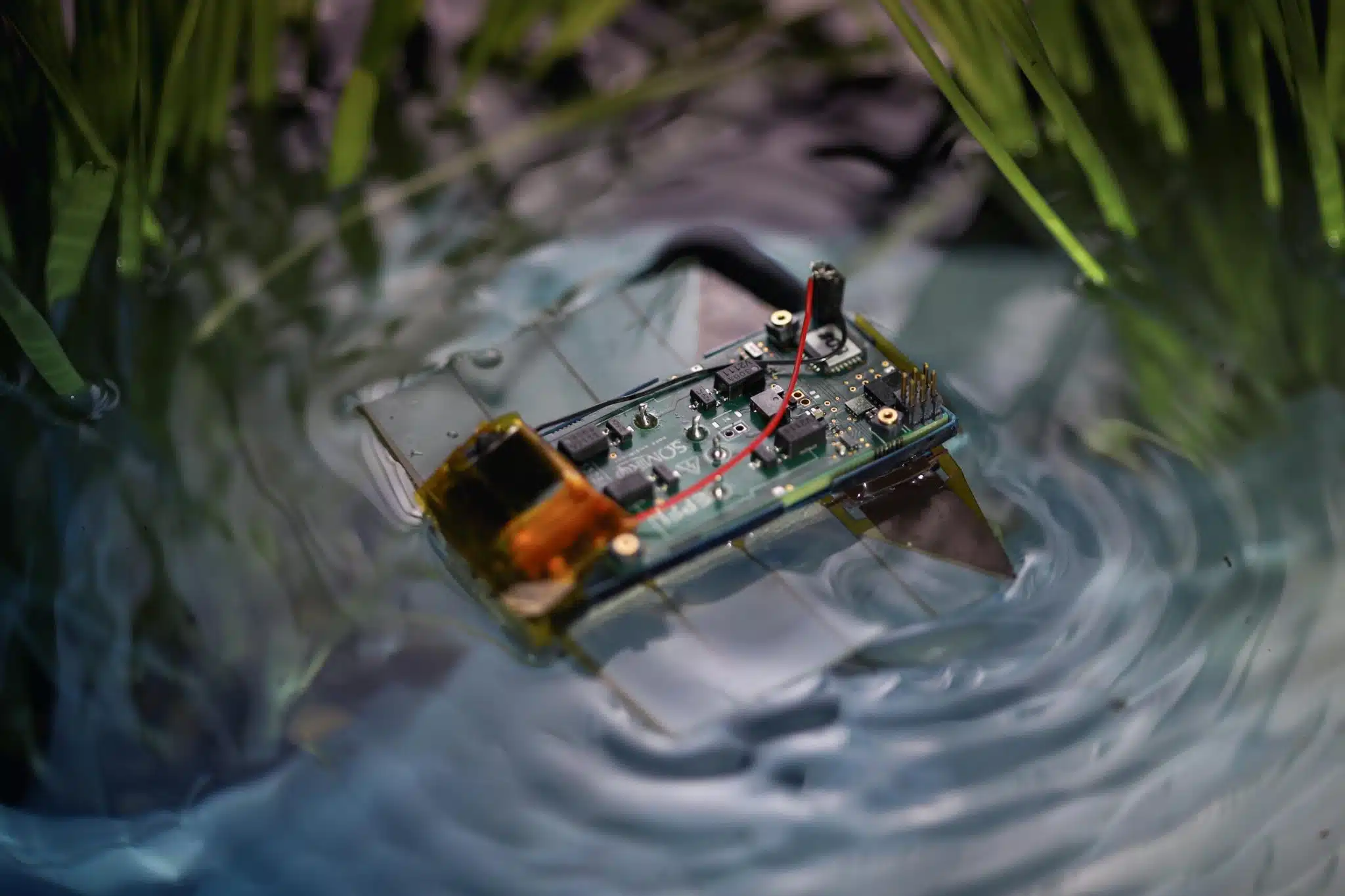
Les vers marins plats se déplacent en générant des vagues qui parcourent leur corps de l’avant vers l’arrière, les propulsant ainsi dans l’eau. Les chercheurs de l’EPFL en Suisse ont observé ce mécanisme fascinant et l’ont reproduit dans un robot compact. Avec un poids de seulement 6 grammes et des dimensions de 45 mm par 55 mm, ce robot est capable de se déplacer librement à la surface de l’eau. Cette conception sans hélice évite les dangers potentiels pour la vie aquatique, tels que les blessures causées par les hélices ou l’enchevêtrement dans les algues.
Ce robot utilise des membranes en caoutchouc souple qui servent de nageoires pectorales. Chaque membrane est connectée à un actionneur électrohydraulique, générant des vagues à travers la membrane pour propulser le robot. Cette technologie permet au robot de surpasser le mouvement naturel des vers plats en ondulant dix fois plus vite, offrant ainsi une amélioration significative par rapport à la nature.
Technologie de propulsion avancée
Le système de propulsion du robot est un chef-d’œuvre d’ingénierie. Les membranes de 6 mm d’épaisseur sont actionnées par un système électronique embarqué qui délivre jusqu’à 500 volts à chaque actionneur avec une puissance de seulement 500 milliwatts. Cette configuration permet au robot de se déplacer à une vitesse impressionnante de 12 cm par seconde. En plus de se déplacer en avant et de tourner sur les côtés, le robot peut également se déplacer latéralement ou en arrière avec l’ajout d’actionneurs supplémentaires.
Un autre avantage de cette technologie est l’absence de bruit de moteur, ce qui est essentiel pour les opérations dans des environnements naturels sensibles. Cette discrétion sonore permet au robot de ne pas perturber la vie marine tout en accomplissant ses tâches. Cette avancée technologique promet d’ouvrir de nouvelles possibilités pour l’exploration et la surveillance aquatiques.
Applications potentielles et avenir
Les applications potentielles pour ce robot sont vastes et variées. Les versions avancées de ce dispositif pourraient être utilisées pour la surveillance environnementale, le suivi de la pollution, et des tâches agricoles de précision dans des environnements comme les rizières inondées. Grâce à ses capteurs de lumière intégrés, le robot peut suivre de manière autonome des sources lumineuses mobiles, lui permettant de naviguer intelligemment dans son environnement.
Florian Hartmann, ancien chercheur de l’EPFL, souligne que les connaissances acquises grâce à ce projet contribueront non seulement à l’avancement de la science des robots bio-inspirés, mais aussi à la création de systèmes robotiques pratiques qui s’harmonisent avec la nature. L’objectif est d’augmenter les temps de fonctionnement et d’améliorer l’autonomie, ouvrant ainsi la voie à des robots encore plus sophistiqués et utiles à l’avenir.
Comparaison avec d’autres robots bio-inspirés
Le concept de robots inspirés par la nature n’est pas nouveau, mais ce robot aquatique se distingue par son efficacité et sa discrétion. Un autre exemple de robot bio-inspiré est le WaterStrider développé par l’Université de l’État de Washington. Ce robot imite le mouvement des araignées d’eau, mais le robot de l’EPFL apporte un niveau de sophistication différent grâce à son mécanisme de propulsion unique.
Tableau comparatif entre le robot flatworm et le WaterStrider :
| Caractéristique | Robot Flatworm | WaterStrider |
|---|---|---|
| Mécanisme de propulsion | Ondulation des membranes | Imitation des pattes d’arachnide |
| Poids | 6 grammes | Variable |
| Vitesse | 12 cm/s | Variable |
| Applications | Surveillance, agriculture | Exploration, recherche |
Avec le développement continu de ces technologies, comment verrons-nous l’impact de ces robots bio-inspirés sur notre compréhension et notre interaction avec les environnements aquatiques à l’avenir ?




Wow, un robot qui se prend pour un ver, c’est du jamais vu ! 🐍
Est-ce que ce robot peut survivre dans des conditions marines extrêmes ?
Je suis impressionné par l’efficacité de ce petit robot !
Ça a l’air génial, mais combien de temps dure la batterie ?
C’est peut-être une innovation, mais qu’en est-il du coût de fabrication ?
Merci pour cet article fascinant, c’est vraiment inspirant ! 😊