




| EN BREF |
|
Le développement de robots autonomes a fait un bond en avant grâce à une innovation majeure en matière de navigation. Les chercheurs de l’Université Northeastern ont mis au point un nouvel algorithme qui améliore considérablement l’efficacité des robots mobiles en réduisant les besoins en mémoire. Ce progrès permet aux robots de se déplacer et de prendre des décisions en utilisant moins de ressources informatiques, ouvrant la voie à une utilisation plus pratique et évolutive dans des environnements réels. Le Deep Feature Assisted Lidar Inertial Odometry and Mapping (DFLIOM) promet d’être une avancée significative dans le domaine de la robotique.
Navigation plus intelligente des robots
Les robots de livraison envahissent de plus en plus nos villes, se déplaçant de manière autonome dans les rues et les quartiers. Pour fonctionner efficacement, ces robots ont besoin de divers capteurs et d’algorithmes sophistiqués. Les capteurs Lidar sont essentiels car ils utilisent des impulsions lumineuses pour détecter les distances, permettant ainsi aux robots d’effectuer une localisation et une cartographie simultanées, connues sous le nom de SLAM. Cependant, cette méthode consomme beaucoup de mémoire pour créer et stocker des cartes précises, ce qui la rend extrêmement gourmande en ressources. Un chargement de mémoire dépassant 10 à 20 gigaoctets peut entraîner une contrainte informatique considérable, limitant ainsi la capacité des robots à opérer sur de longues distances ou périodes.
Sous la direction du professeur Michael Everett, un étudiant en doctorat nommé Zihao Dong a mené une recherche visant à réduire ce fardeau informatique. Le nouvel algorithme, DFLIOM, parvient à être jusqu’à 57 % moins gourmand en ressources que les méthodes actuelles, marquant ainsi une étape importante dans l’optimisation de la navigation robotique.
Vision robotique optimisée
Le DFLIOM s’appuie sur une approche précédente connue sous le nom de Direct Lidar Inertial Odometry and Mapping (DLIOM), qui combine des capteurs lidar avec des unités de mesure inertielle pour cartographier en trois dimensions. Bien que les deux techniques utilisent des technologies similaires, le DFLIOM introduit une méthode de balayage novatrice qui traite sélectivement uniquement les points de données les plus essentiels. Cette approche réduit la quantité de données nécessaires et, dans certains cas, augmente la précision de la cartographie.
Les chercheurs remettent en question l’idée répandue selon laquelle la performance s’améliore avec plus de données. Ils soutiennent que les algorithmes peuvent être submergés par trop de données, ce qui entraîne un traitement plus lent et une efficacité moindre. En développant des algorithmes plus intelligents pour reconnaître et utiliser uniquement les données les plus pertinentes, ils ouvrent la voie à des robots mobiles capables de travailler plus longtemps, plus rapidement et plus efficacement dans des environnements réels.

Test du nouvel algorithme
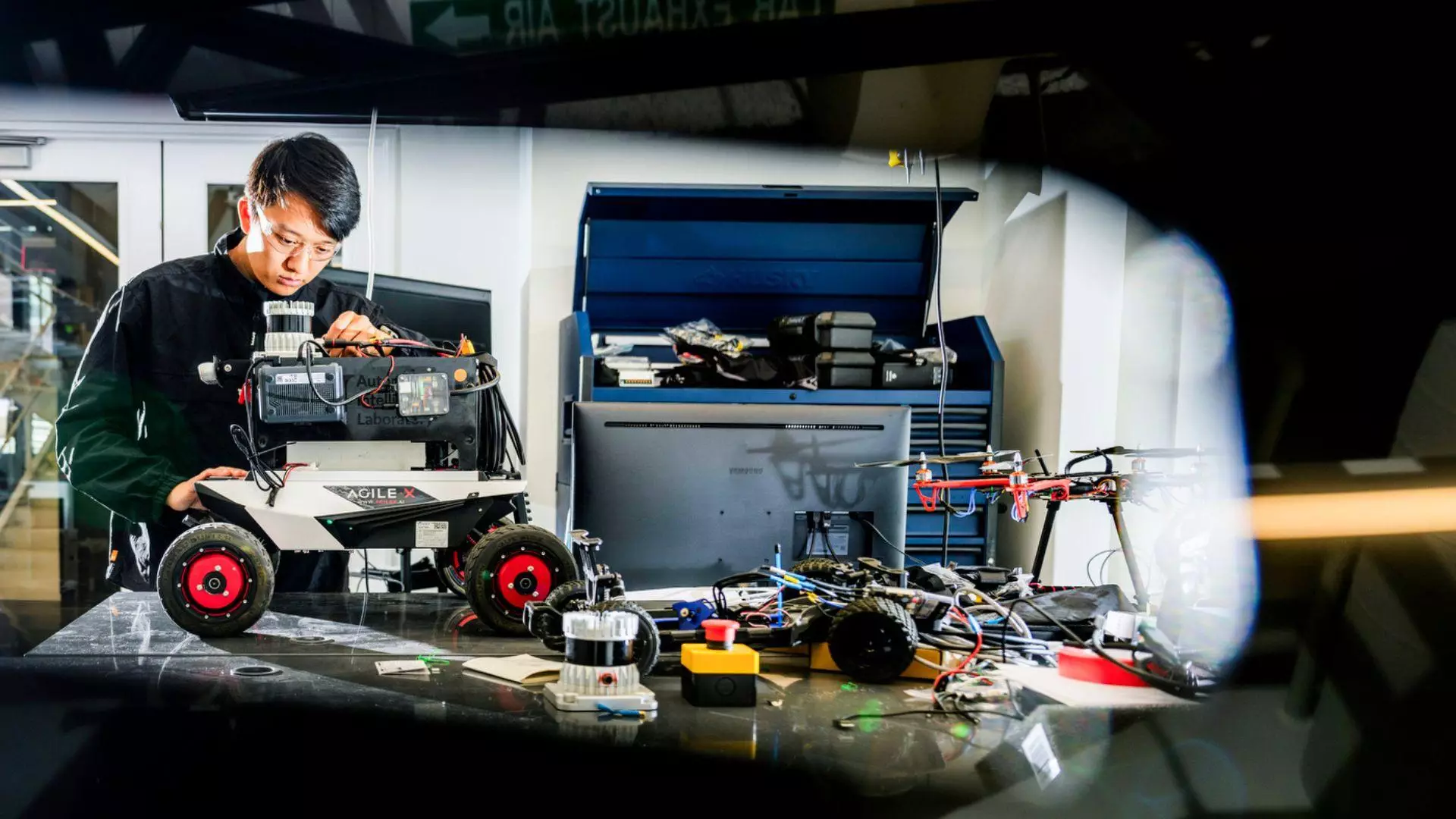
Pour tester leur algorithme, les chercheurs ont utilisé le petit robot Agile X Scout de Northeastern, équipé d’un kit autonome, d’un capteur lidar Ouster, d’une batterie et d’un mini PC Intel NUC. Le robot a généré des cartes 3D de plusieurs lieux extérieurs sur le campus de l’Université, y compris Centennial Common, Egan Crossing et Shillman Hall, démontrant la capacité de l’algorithme à fonctionner dans des environnements variés et complexes. Les chercheurs affirment que ce travail représente une avancée majeure dans le développement de systèmes autonomes pratiques et évolutifs.
Les détails des recherches de l’équipe sont disponibles sur GitHub, offrant ainsi à la communauté scientifique et aux développeurs la possibilité de contribuer à l’amélioration continue de cette technologie prometteuse.
Perspectives d’avenir
L’innovation apportée par le DFLIOM ouvre de nouvelles perspectives pour les robots autonomes, leur permettant de s’intégrer de manière plus fluide dans notre quotidien. En réduisant les exigences en termes de mémoire et de traitement, cette avancée pourrait transformer la manière dont les robots sont utilisés dans des secteurs variés, allant de la livraison de colis à la surveillance de sécurité. Les chercheurs de l’Université Northeastern ont ainsi jeté les bases d’une nouvelle ère pour la robotique, où l’efficacité et la praticité vont de pair.
Comment ces avancées technologiques influenceront-elles notre interaction quotidienne avec les robots et quelles nouvelles opportunités pourraient-elles créer pour les industries émergentes?




Quel progrès incroyable! Ça me fascine de voir à quel point la technologie avance vite. 😊
Les robots vont-ils bientôt remplacer nos livreurs? 😅
Superbe avancée! Merci aux chercheurs pour leur travail acharné! 👍
J’espère que cette technologie sera accessible à tous et pas juste aux grandes entreprises.
Est-ce que cet algorithme pourrait être appliqué aux drones aussi?
Ça a l’air prometteur, mais qu’en est-il de la sécurité des données?
J’ai hâte de voir comment cette innovation va changer notre quotidien!
Un grand pas pour la robotique, mais qu’en est-il de l’éthique?
Est-ce que l’algorithme peut être implémenté facilement sur des robots déjà existants?
Une belle avancée, mais j’espère que ça ne mènera pas à des pertes d’emplois.
Vraiment impressionnant! Les chercheurs méritent une médaille! 🏅
Est-ce que cela signifie que les robots deviendront plus abordables?
Les chercheurs de Northeastern frappent fort cette fois-ci!
Comment s’assurer que ces robots ne posent pas de problèmes de sécurité dans nos rues?
Les robots pourraient-ils aussi naviguer dans des environnements non urbains?
Quel est le coût de développement de cet algorithme?
J’adore quand la technologie nous simplifie la vie! Merci! 😊
Les robots vont-ils bientôt marcher parmi nous comme dans les films?
Un progrès technologique qui pourrait révolutionner bien des secteurs! 🔧
Est-ce que cette technologie est déjà utilisée quelque part?
Bravo aux chercheurs! J’espère que ça inspirera d’autres innovations. 🌟
Les robots pourraient-ils se perdre avec ce nouvel algorithme?
J’espère que cette technologie ne sera pas utilisée à mauvais escient.
Quid de la consommation d’énergie avec cet algorithme? 💡
Est-ce que l’efficacité accrue signifie aussi moins de pannes?
Les chercheurs de Northeastern sont vraiment à la pointe de l’innovation!
Avec moins de mémoire utilisée, on pourrait imaginer des robots plus petits, non?
Est-ce que cet algorithme pourrait aider à la recherche et sauvetage en milieu difficile?
Les robots sont l’avenir, et cet algorithme en est la preuve!
J’espère que cette technologie sera utilisée pour le bien de tous. 🤖
Une avancée fascinante! Je suis curieux de voir les prochaines étapes. 🔍
57% de mémoire en moins, c’est énorme! Quelle sera la prochaine étape?
Est-ce que cet algorithme pourrait être utilisé dans les voitures autonomes?
Merci à l’Université Northeastern pour cette innovation incroyable! 😊